|
Free motion commands use the information of joint angular sensors. 
1. Free Move Command - moving to the point with the Cartesian coordinates set by a user (automatic regime).
2. Jog Command - moving the gripper along one of the six Cartesian coordinate axes with the speed set by a user (manual regime).
3. Step Command - moving along one of the Cartesian coordinate axes of the gripper for the distance set by a user (manual regime).
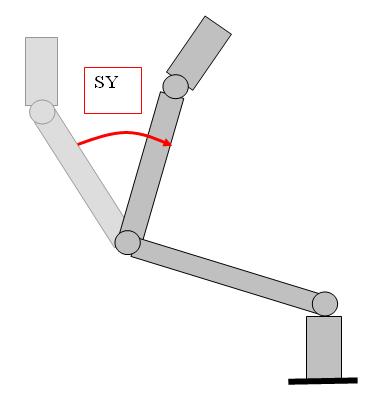
4. Single Joint Jog Command - movement in one of the joints with the set speed (manual regime).
5. Single Joint Move Command - moving one of the joints to the position set by a user (automatic regime).
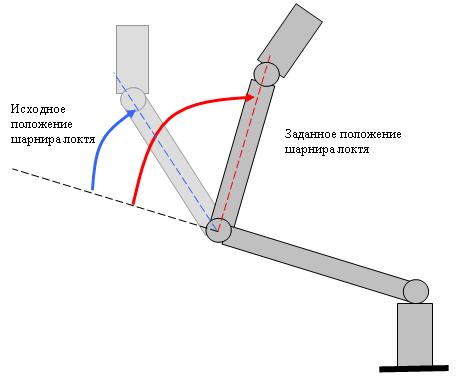
6. Pitch Move Command - synchronous motion in 3 joints: Shoulder Pitch, Elbow Pitch and Wrist Pitch (automatic regime).
7. Command Soft Emergency Stop - program stopping of manipulator.
|